Hi Mathijs,
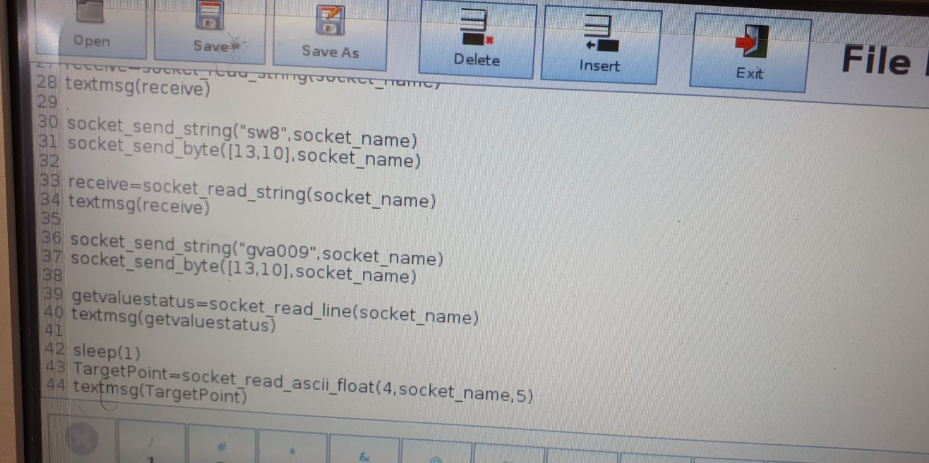
Thank you so much for your reply. I just managed to try it out. It worked. The communication is established but now I have another issue to read the values on the defined cell. It’s giving [0,nan,nan,nan,nan]. Am I missing anything?
Please see below code & in-sight settings in below: