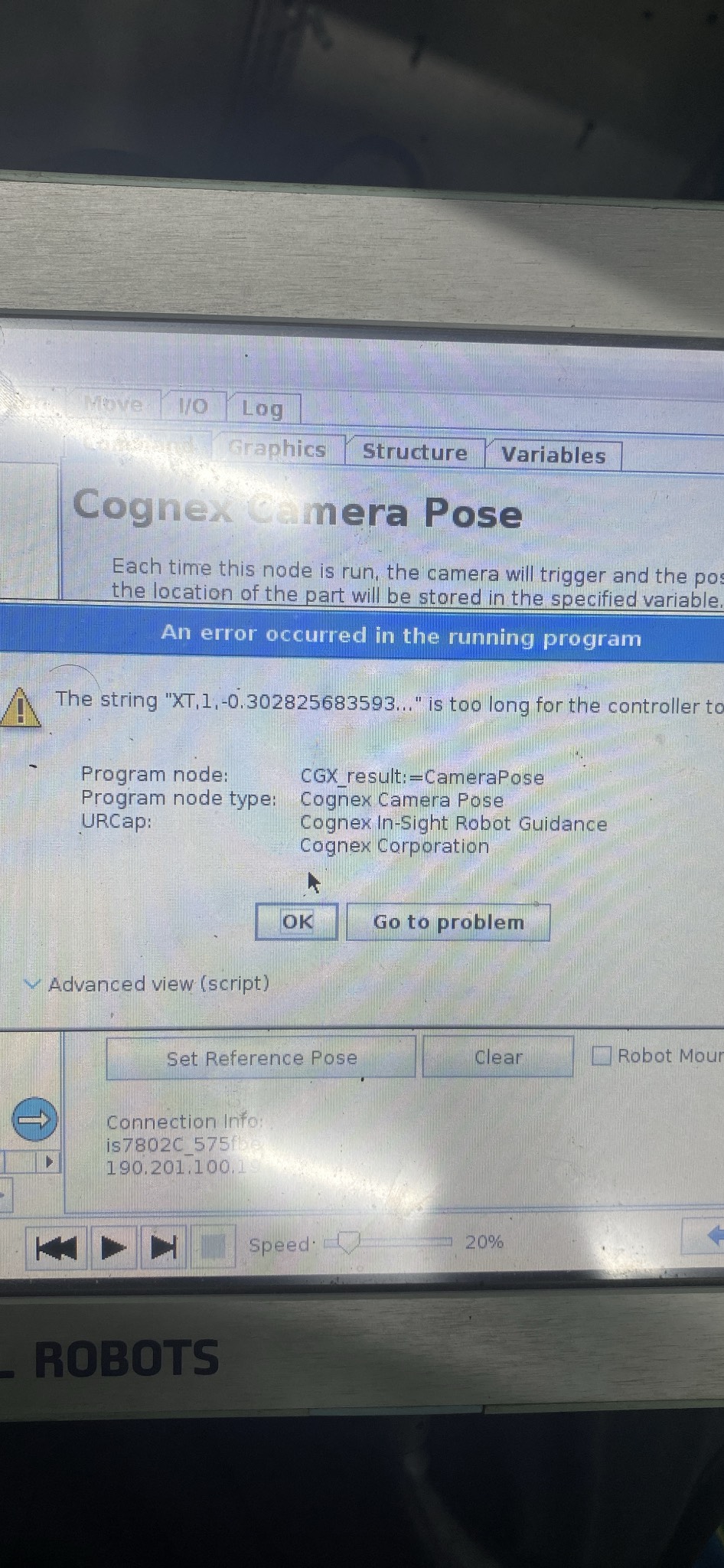
Hi every one, i am try to use the COGNEX CAMERA 7802 to guide the UR3 robot for pick and place application, when running sometime this error happen, could anyone help me to solve it?
1 Like
Hi Dylan,
It looks like it doesn’t want to process the string because of a character limit somewhere.
You could try to get rid of some decimals in your vision job using the FormatString function:
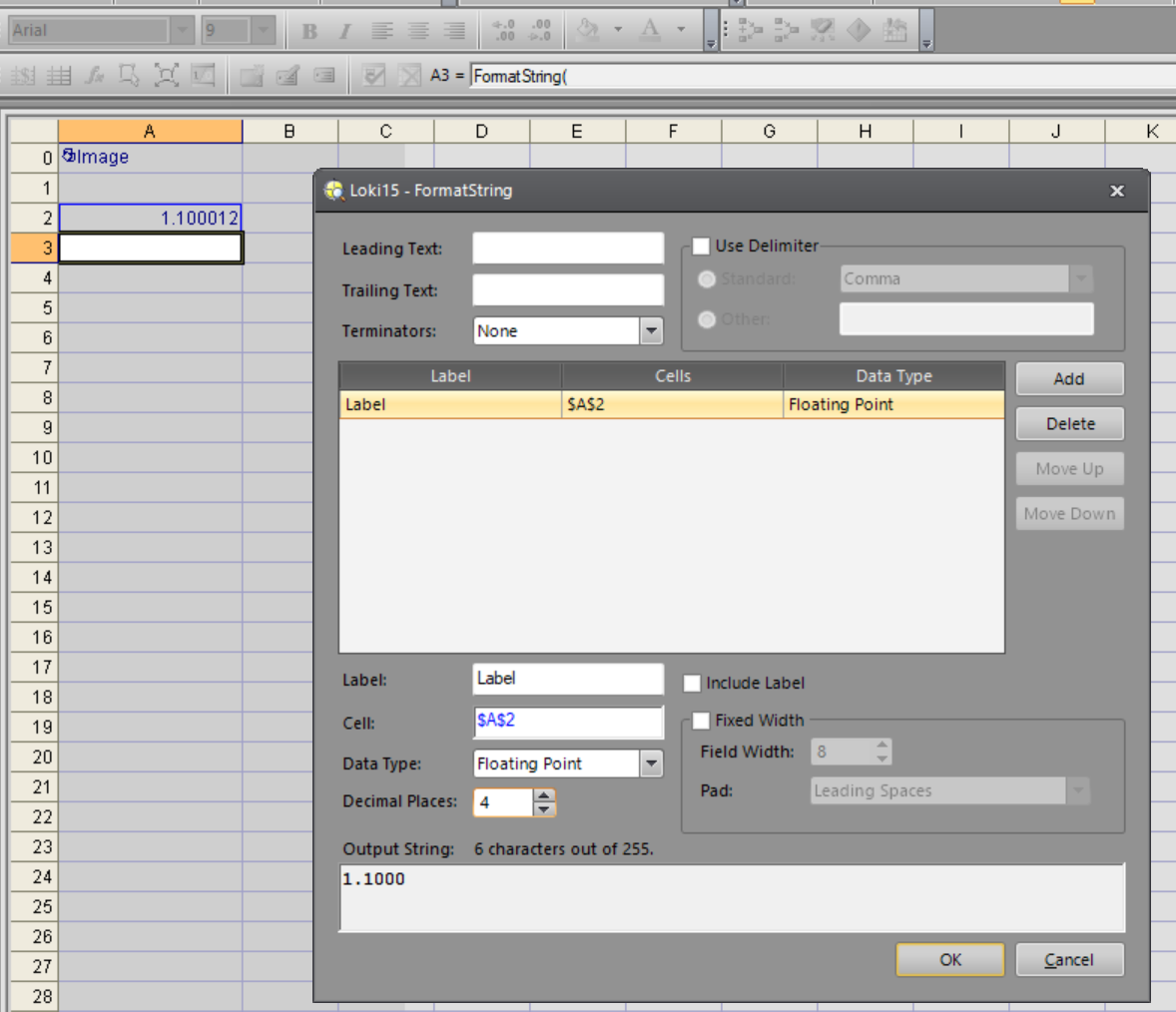
This will limit the number of decimals to a maximum of 6 which saves you a lot of characters.
1 Like
Thanks a lot, i fixed it with your help.
by the way, my robot always does not go to the correct point to pick , i have to offset in the insight software. do you have any ideal for this problem?
That is probably a calibration issue. How did you do your calibration?
I calibration follow this guide
EasyBuilder Help - Connect to the Vision System and Perform Hand-Eye Calibration - Documentation | Cognex
I can’t tell exactly why it does what it does but here are a few things that might lead to this problem:
- Lens distortion. If you have a cheap lens with a lot of distortion this might lead to calibration issues. You could try to solve this by undistorting the image.
- Moving the robot to 3 different points and using that as input for a calibration is prone to errors. If these points are approximations this will lead to undesirable result. Maybe calibrating using a calibration grid might help here. The benefit is that you will get a good conversion from pixels to mm, and you only need to calculate the offset once between the camera and robot.
- To be sure, please check if the camera is triggered properly. If not you might get the same coordinates again.
Can you explain in a few sentences how you perform the calibration?
1 Like