Hay,
I have a program for a UR10 where it is following a path on a surface. When it is moving it puts force on the surface. We use an Optoforce sensor for this process. In the software of the sensor there is a force controlled movement. This is what we use to go from point to point, but at every point it stops for a few seconds.
Is there a way to make that movement smooth without the wait in between?
Their problem is probably related to the optoforce software component. This software is the part making adjustments to the movement, so this probably has nothing to do with the default movement blend radius setting.
Below a small piece of the code where the sensor is used. example code.rtf (2.8 KB)
I use a list of coordinates where the robot needs to go. With a while loop I go through the list and put the coordinates inside the move command.
I have talked about this with Guus, and he told me you guys use RoboDK for code generation. Could you sh
are the RoboDK script / files?
Edit:
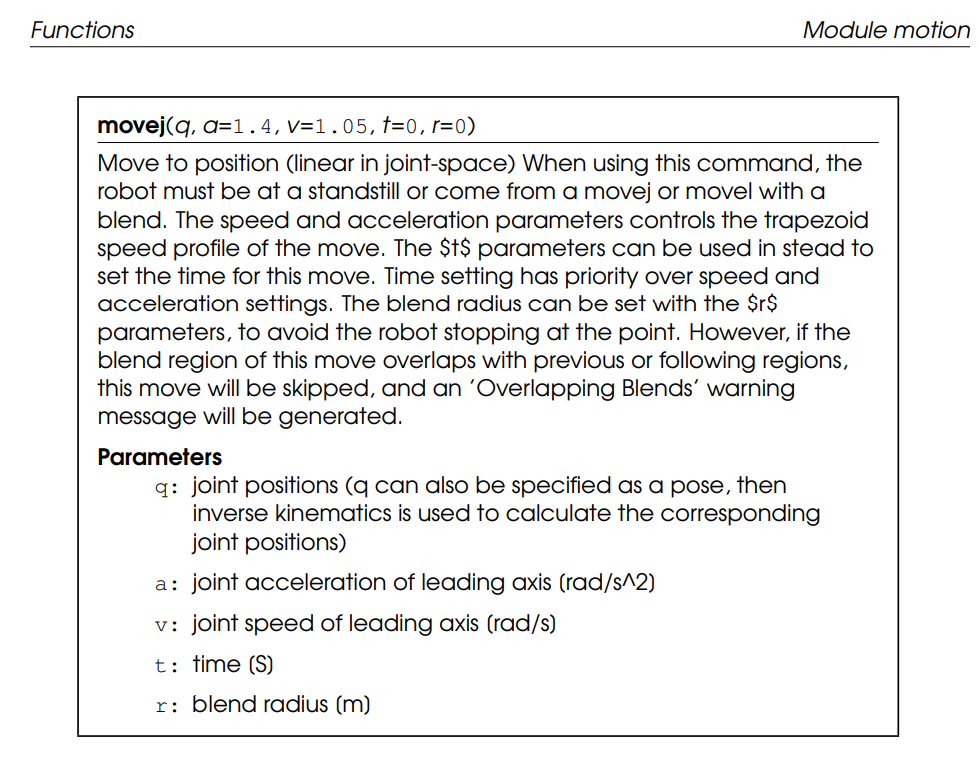
Nevermind, you guys are only generating the path in RoboDK right? Could you configure your movement commands in a different way? Setting the blend radius as suggested by @RoelT (It is in Meters, so fill in something that makes sense. It looks like the default value is 50.0 mm / 0.05 m)
Can you try to make a simple force controlled movement using just a few points you define yourself instead of the points generated by RoboDK? What are the results on that?