I have talked about this with Guus, and he told me you guys use RoboDK for code generation. Could you sh
are the RoboDK script / files?
Edit:
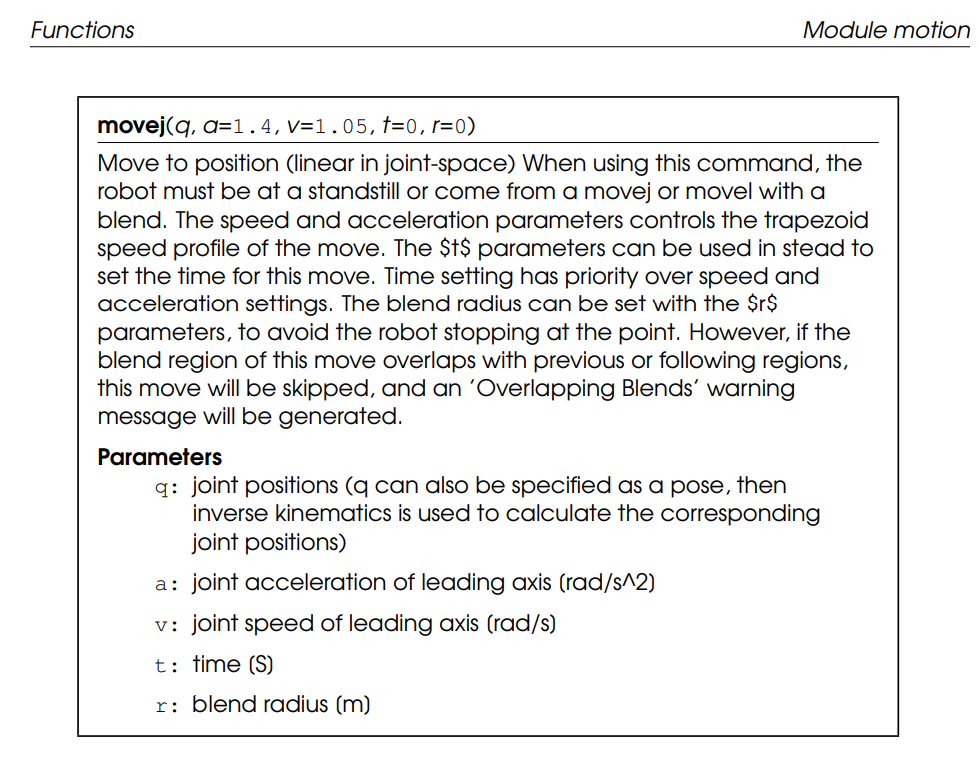
Nevermind, you guys are only generating the path in RoboDK right? Could you configure your movement commands in a different way? Setting the blend radius as suggested by @RoelT (It is in Meters, so fill in something that makes sense. It looks like the default value is 50.0 mm / 0.05 m)
Let me know if this changes anything!
movej(q, a=1.4, v=1.05, t=0, r=0)
movej(HOME, a=1.3962634015954636, v=1.0471975511965976, r=0.05)