The robot-IQ gripper consist of a mounting piece, a gripper, a USB to RS485 converter and a 5-pin wire extention cable that can be attached to the wire on the mounting piece. See the necessary equipment below:


During this How-To there will be references to the manual, which can be found here:
Installation
Step 1: The first step to installing the robot-IQ gripper is to connect the mounting piece to the end-effector of the robot arm. Now screw the robot-IQ gripper into the mounting piece, make sure the pins on the bottom of the gripper align with those on the top of the mounting piece.
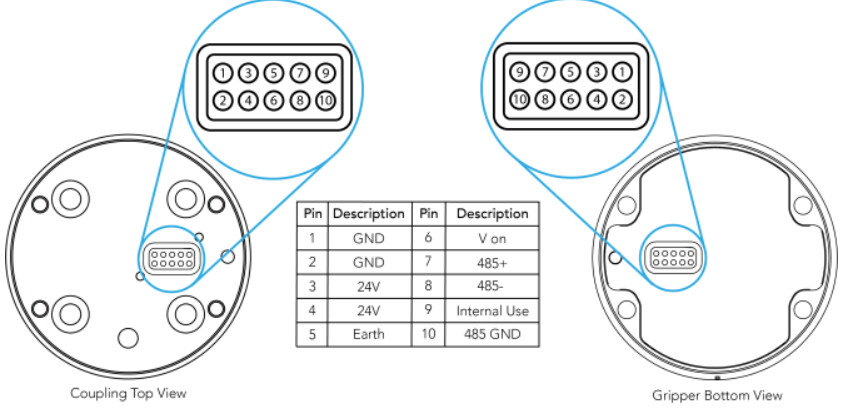
Step 2: The second step is to differentiate the wires that come from the robot gripper. Look at the indent in the 5-pin wire and start connecting from there, using the following picture:
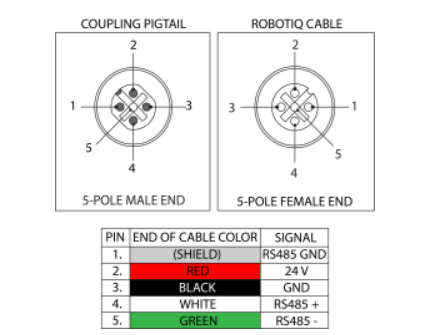
(If the extention wire you use does not have the same colours as the image above, you can measure the wire through. In this case you want to disconnect the robot gripper from the mounting piece and measure the cable through. You will know what wire serves what purpose by looking at the picture we used at step one and seeing what tag is connected to it. P.S.: Don’t worry if the VCC cable cant be measured, this wire cant be read for safety reasons)
Step 3: Connect the RS485+, RS485- and RS485 GND to the corrosponding pins in the RS485 to USB converter. Connect the 24 V and GND the corrosponding places in the PLC.
Optional Step 4: To test if the gripper actually works you can try and control it using your laptop. In this case you want to connect the RS485 to USB into your laptop and make sure the 24V is active. Now install the user interface on the site of robot-IQ (The software: * Installer (v2.4.9)) (The site: Support | Robotiq)
Set the software up, if done correctly it should look like the following picture:
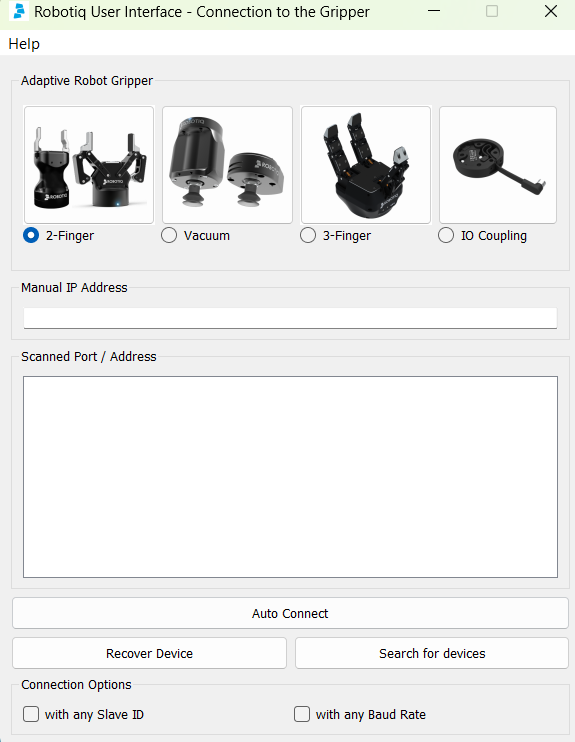
If you have the RS485-USB converter plugged into your computer and search for devices, a port should pop up and turn green. At that point you click on Auto connect and you can control the gripper using the interface on your computer. If a port pops up but turns red, either your pins are not making contact with their port or you have not turned the 24V on yet.
Step 5: To control the robot gripper using the PLC you connect the RS485-USB to a USB slot in the PLC and connect the 24V and ground to their designated places in the PLC. Download the required software that corrosponds to your PLC from the robot-IQ website. If in doubt about what version the current PLC is, use the 3.15.3 version. (The website to download the software: Support | Robotiq) (Version 3.19.1: * Gripper URCap (UCG-3.19.1 for Polyscope 5.19.0+)) (Version 3.15.3: * Gripper URCap (UCG-1.8.13 for Polyscope 3.15.3+))
Put this software on a USB-stick, place it into one of the USB slots in the PLC and download the software. You know the installation is a succes if you see a small R right next to the local/remote button. If you click on the R a small window will pop up to initialise the gripper. After you initialise, the gripper should turn blue (instead of red) and a new window will show up from which you can control the gripper. To control the gripper using comands, see the following article: My Document
If you want to control the robot-IQ gripper using a pyhton script you can use the code stated below. Before running any other functions use the init(self) function and after that the connect() function. To grab with the gripper you are going to want to change the following variables to the required amount: speed, force and position. To activate the gripper call on the move() command.
"""Module to control Robotiq's grippers - tested with HAND-E"""
import socket
import threading
import time
from enum import Enum
from typing import Union, Tuple, OrderedDict
class RobotiqGripper:
"""
Communicates with the gripper directly, via socket with string commands, leveraging string names for variables.
"""
# WRITE VARIABLES (CAN ALSO READ)
ACT = 'ACT' # act : activate (1 while activated, can be reset to clear fault status)
GTO = 'GTO' # gto : go to (will perform go to with the actions set in pos, for, spe)
ATR = 'ATR' # atr : auto-release (emergency slow move)
ADR = 'ADR' # adr : auto-release direction (open(1) or close(0) during auto-release)
FOR = 'FOR' # for : force (0-255)
SPE = 'SPE' # spe : speed (0-255)
POS = 'POS' # pos : position (0-255), 0 = open
# READ VARIABLES
STA = 'STA' # status (0 = is reset, 1 = activating, 3 = active)
PRE = 'PRE' # position request (echo of last commanded position)
OBJ = 'OBJ' # object detection (0 = moving, 1 = outer grip, 2 = inner grip, 3 = no object at rest)
FLT = 'FLT' # fault (0=ok, see manual for errors if not zero)
ENCODING = 'UTF-8' # ASCII and UTF-8 both seem to work
class GripperStatus(Enum):
"""Gripper status reported by the gripper. The integer values have to match what the gripper sends."""
RESET = 0
ACTIVATING = 1
# UNUSED = 2 # This value is currently not used by the gripper firmware
ACTIVE = 3
class ObjectStatus(Enum):
"""Object status reported by the gripper. The integer values have to match what the gripper sends."""
MOVING = 0
STOPPED_OUTER_OBJECT = 1
STOPPED_INNER_OBJECT = 2
AT_DEST = 3
def __init__(self):
"""Constructor."""
self.socket = None
self.command_lock = threading.Lock()
self._min_position = 0
self._max_position = 255
self._min_speed = 0
self._max_speed = 255
self._min_force = 0
self._max_force = 255
def connect(self, hostname: str, port: int, socket_timeout: float = 2.0) -> None:
"""Connects to a gripper at the given address.
:param hostname: Hostname or ip.
:param port: Port.
:param socket_timeout: Timeout for blocking socket operations.
"""
self.socket = socket.socket(socket.AF_INET, socket.SOCK_STREAM)
self.socket.connect((hostname, port))
self.socket.settimeout(socket_timeout)
def disconnect(self) -> None:
"""Closes the connection with the gripper."""
self.socket.close()
def logInfo(self):
print(f"Pos: {str(self.get_current_position()): >3} "
f"Open: {self.is_open(): <2} "
f"Closed: {self.is_closed(): <2} ")
def _set_vars(self, var_dict: OrderedDict[str, Union[int, float]]):
"""Sends the appropriate command via socket to set the value of n variables, and waits for its 'ack' response.
:param var_dict: Dictionary of variables to set (variable_name, value).
:return: True on successful reception of ack, false if no ack was received, indicating the set may not
have been effective.
"""
# construct unique command
cmd = "SET"
for variable, value in var_dict.items():
cmd += f" {variable} {str(value)}"
cmd += '\n' # new line is required for the command to finish
# atomic commands send/rcv
with self.command_lock:
self.socket.sendall(cmd.encode(self.ENCODING))
data = self.socket.recv(1024)
return self._is_ack(data)
def _set_var(self, variable: str, value: Union[int, float]):
"""Sends the appropriate command via socket to set the value of a variable, and waits for its 'ack' response.
:param variable: Variable to set.
:param value: Value to set for the variable.
:return: True on successful reception of ack, false if no ack was received, indicating the set may not
have been effective.
"""
return self._set_vars(OrderedDict([(variable, value)]))
def _get_var(self, variable: str):
"""Sends the appropriate command to retrieve the value of a variable from the gripper, blocking until the
response is received or the socket times out.
:param variable: Name of the variable to retrieve.
:return: Value of the variable as integer.
"""
# atomic commands send/rcv
with self.command_lock:
cmd = f"GET {variable}\n"
self.socket.sendall(cmd.encode(self.ENCODING))
data = self.socket.recv(1024)
# expect data of the form 'VAR x', where VAR is an echo of the variable name, and X the value
# note some special variables (like FLT) may send 2 bytes, instead of an integer. We assume integer here
var_name, value_str = data.decode(self.ENCODING).split()
if var_name != variable:
raise ValueError(f"Unexpected response {data} ({data.decode(self.ENCODING)}): does not match '{variable}'")
value = int(value_str)
return value
@staticmethod
def _is_ack(data: str):
return data == b'ack'
def _reset(self):
"""
Reset the gripper.
The following code is executed in the corresponding script function
def rq_reset(gripper_socket="1"):
rq_set_var("ACT", 0, gripper_socket)
rq_set_var("ATR", 0, gripper_socket)
while(not rq_get_var("ACT", 1, gripper_socket) == 0 or not rq_get_var("STA", 1, gripper_socket) == 0):
rq_set_var("ACT", 0, gripper_socket)
rq_set_var("ATR", 0, gripper_socket)
sync()
end
sleep(0.5)
end
"""
self._set_var(self.ACT, 0)
self._set_var(self.ATR, 0)
while (not self._get_var(self.ACT) == 0 or not self._get_var(self.STA) == 0):
self._set_var(self.ACT, 0)
self._set_var(self.ATR, 0)
time.sleep(0.5)
def activate(self, auto_calibrate: bool = True):
"""Resets the activation flag in the gripper, and sets it back to one, clearing previous fault flags.
:param auto_calibrate: Whether to calibrate the minimum and maximum positions based on actual motion.
The following code is executed in the corresponding script function
def rq_activate(gripper_socket="1"):
if (not rq_is_gripper_activated(gripper_socket)):
rq_reset(gripper_socket)
while(not rq_get_var("ACT", 1, gripper_socket) == 0 or not rq_get_var("STA", 1, gripper_socket) == 0):
rq_reset(gripper_socket)
sync()
end
rq_set_var("ACT",1, gripper_socket)
end
end
def rq_activate_and_wait(gripper_socket="1"):
if (not rq_is_gripper_activated(gripper_socket)):
rq_activate(gripper_socket)
sleep(1.0)
while(not rq_get_var("ACT", 1, gripper_socket) == 1 or not rq_get_var("STA", 1, gripper_socket) == 3):
sleep(0.1)
end
sleep(0.5)
end
end
"""
if not self.is_active():
self._reset()
while (not self._get_var(self.ACT) == 0 or not self._get_var(self.STA) == 0):
time.sleep(0.01)
self._set_var(self.ACT, 1)
time.sleep(1.0)
while (not self._get_var(self.ACT) == 1 or not self._get_var(self.STA) == 3):
time.sleep(0.01)
# auto-calibrate position range if desired
if auto_calibrate:
self.auto_calibrate()
def is_active(self):
"""Returns whether the gripper is active."""
status = self._get_var(self.STA)
return RobotiqGripper.GripperStatus(status) == RobotiqGripper.GripperStatus.ACTIVE
def get_min_position(self) -> int:
"""Returns the minimum position the gripper can reach (open position)."""
return self._min_position
def get_max_position(self) -> int:
"""Returns the maximum position the gripper can reach (closed position)."""
return self._max_position
def get_open_position(self) -> int:
"""Returns what is considered the open position for gripper (minimum position value)."""
return self.get_min_position()
def get_closed_position(self) -> int:
"""Returns what is considered the closed position for gripper (maximum position value)."""
return self.get_max_position()
def is_open(self):
"""Returns whether the current position is considered as being fully open."""
return self.get_current_position() <= self.get_open_position()
def is_closed(self):
"""Returns whether the current position is considered as being fully closed."""
return self.get_current_position() >= self.get_closed_position()
def get_current_position(self) -> int:
"""Returns the current position as returned by the physical hardware."""
return self._get_var(self.POS)
def auto_calibrate(self, log: bool = True) -> None:
"""Attempts to calibrate the open and closed positions, by slowly closing and opening the gripper.
:param log: Whether to print the results to log.
"""
# first try to open in case we are holding an object
(position, status) = self.move_and_wait_for_pos(self.get_open_position(), 64, 1)
if RobotiqGripper.ObjectStatus(status) != RobotiqGripper.ObjectStatus.AT_DEST:
raise RuntimeError(f"Calibration failed opening to start: {str(status)}")
# try to close as far as possible, and record the number
(position, status) = self.move_and_wait_for_pos(178, 64, 1) # Changed value so it wont break pincers self.get_closed_position()
if RobotiqGripper.ObjectStatus(status) != RobotiqGripper.ObjectStatus.AT_DEST:
raise RuntimeError(f"Calibration failed because of an object: {str(status)}")
assert position <= self._max_position
self._max_position = position
# try to open as far as possible, and record the number
(position, status) = self.move_and_wait_for_pos(self.get_open_position(), 64, 1)
if RobotiqGripper.ObjectStatus(status) != RobotiqGripper.ObjectStatus.AT_DEST:
raise RuntimeError(f"Calibration failed because of an object: {str(status)}")
assert position >= self._min_position
self._min_position = position
if log:
print(f"Gripper auto-calibrated to [{self.get_min_position()}, {self.get_max_position()}]")
def move(self, position: int, speed: int, force: int) -> Tuple[bool, int]:
"""Sends commands to start moving towards the given position, with the specified speed and force.
:param position: Position to move to [min_position, max_position]
:param speed: Speed to move at [min_speed, max_speed]
:param force: Force to use [min_force, max_force]
:return: A tuple with a bool indicating whether the action it was successfully sent, and an integer with
the actual position that was requested, after being adjusted to the min/max calibrated range.
"""
def clip_val(min_val, val, max_val):
return max(min_val, min(val, max_val))
clip_pos = clip_val(self._min_position, position, self._max_position)
clip_spe = clip_val(self._min_speed, speed, self._max_speed)
clip_for = clip_val(self._min_force, force, self._max_force)
# moves to the given position with the given speed and force
var_dict = OrderedDict([(self.POS, clip_pos), (self.SPE, clip_spe), (self.FOR, clip_for), (self.GTO, 1)])
return self._set_vars(var_dict), clip_pos
def move_and_wait_for_pos(self, position: int, speed: int, force: int) -> Tuple[int, ObjectStatus]: # noqa
"""Sends commands to start moving towards the given position, with the specified speed and force, and
then waits for the move to complete.
:param position: Position to move to [min_position, max_position]
:param speed: Speed to move at [min_speed, max_speed]
:param force: Force to use [min_force, max_force]
:return: A tuple with an integer representing the last position returned by the gripper after it notified
that the move had completed, a status indicating how the move ended (see ObjectStatus enum for details). Note
that it is possible that the position was not reached, if an object was detected during motion.
"""
set_ok, cmd_pos = self.move(position, speed, force)
if not set_ok:
raise RuntimeError("Failed to set variables for move.")
# wait until the gripper acknowledges that it will try to go to the requested position
while self._get_var(self.PRE) != cmd_pos:
time.sleep(0.001)
# wait until not moving
cur_obj = self._get_var(self.OBJ)
while RobotiqGripper.ObjectStatus(cur_obj) == RobotiqGripper.ObjectStatus.MOVING:
cur_obj = self._get_var(self.OBJ)
# report the actual position and the object status
final_pos = self._get_var(self.POS)
final_obj = cur_obj
return final_pos, RobotiqGripper.ObjectStatus(final_obj)