Danny
November 7, 2017, 8:15am
1
Everyone,
In the link below you can find several topics about options with UR robots.
http://www.universal-robots.cn/how-tos-and-faqs/how-to/
problems, tips and tricks etc.
the youtube links below makes clear how to make a profinet connection with UR10
if you have any questions come to me or place them in this topic
Danny van Egmond
Danny
November 7, 2017, 8:16am
2
Note: the profinet connection is only possible with the UR10 CB3 V3.3
Mathijs
November 8, 2017, 8:57am
3
Or modbus right?
For older firmware versions (1.6 and forward) you can find info about it here:
https://www.universal-robots.com/how-tos-and-faqs/how-to/ur-how-tos/modbus-server-16377/
Danny
November 8, 2017, 9:44am
4
It depends on what you want to do, as you can see in the table (from the link) you can write only the inputs and outputs. Not the states of the machine. This was also the problem with the profinet connection.
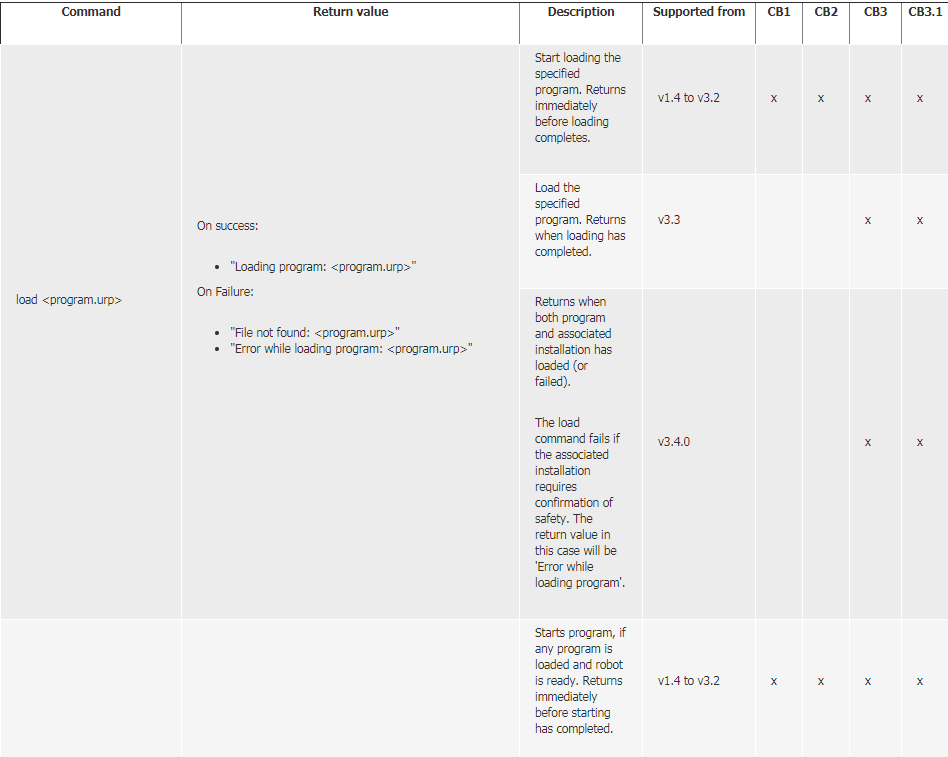
Ethernet gives you this opportunity to change the states by sending strings like “play” en “stop” to a specific port of the robot. (see link)https://www.universal-robots.com/how-tos-and-faqs/how-to/ur-how-tos/dashboard-server-port-29999-15690/
this is what we did in our project and thereby the use of the teachpanel wasn’t necessary
Mathijs
November 8, 2017, 9:56am
5
So basically we would need a chart with all the functionalities and which ones work over Ethernet, Profinet and Modbus?
Danny
November 8, 2017, 10:30am
6
in the topics you can find that kind of charts you want
see below for “load” command and on the right of the image the functionality/compatibility for each type of robot and firmware version