Kawasaki provides the user unfriendly KCPwinTCP telnet application to connect to the robot. It’s awful. Can anyone contribute an application (PuTTY with specific settings?) + workflow combination? I really want a way to use my own text editor (ie. Sublime) with PuTTY.
1 Like
KCWinTCP is indeed a horrible piece of software. Let´s look at the alternatives.
Kawasaki Tools
From robot-forum.com:
- KCWin32, does not support TCP so that one isn’t any good
- KRTerm (Kawasaki Robot Terminal)KRTerm 1.2.8.zip (950.5 KB)
- Kawasaki IDE KIDE-0.9.4.7.ZIP (5.8 MB)
Possible solution
As mentioned by Thijs you could use Sublime Text or any other text editor. You can create a syntax file for it. It looks like you can copy and paste stuff in KRTerm but we should probably test that.
It is also possible to save and load data from the current working directory of KCWin or KRTerm.
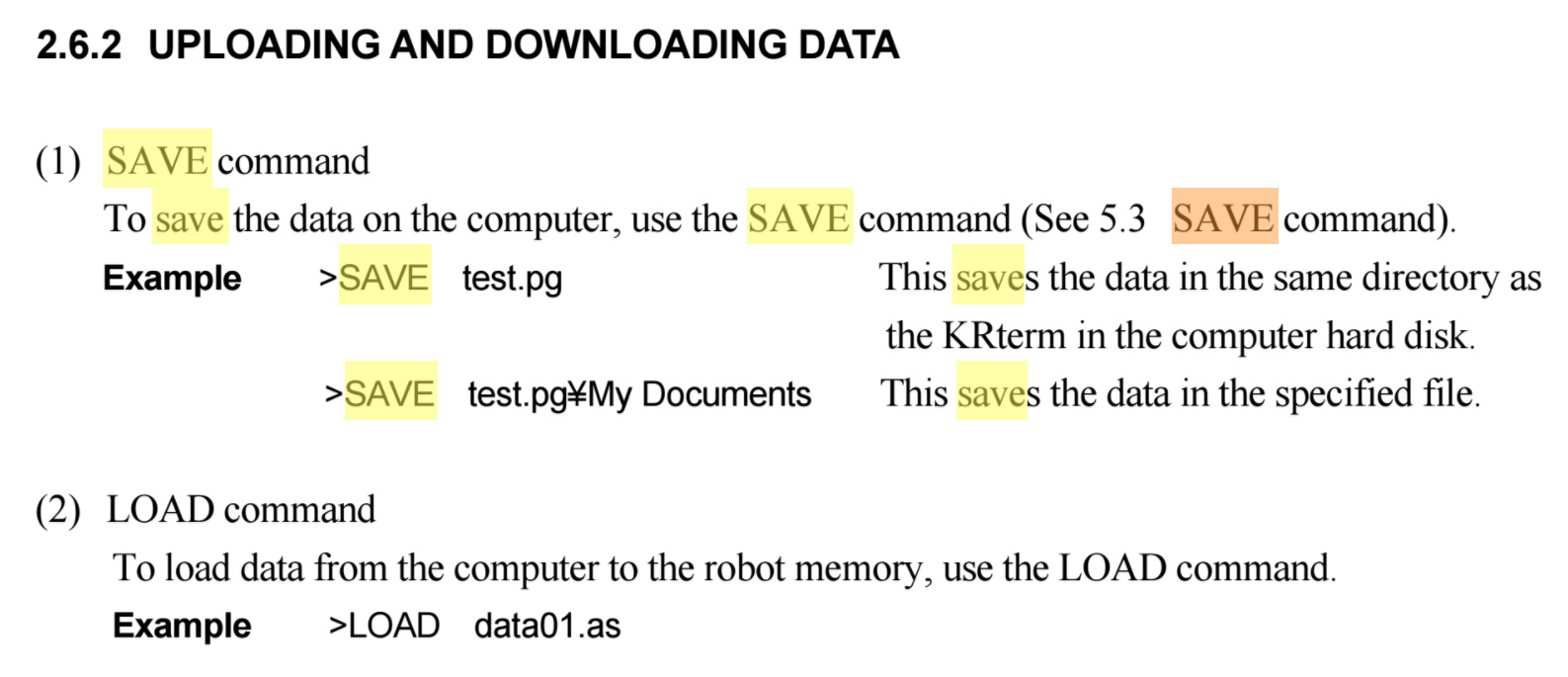
I think editing on PC and using LOAD / SAVE command could be sufficient, but a custom language syntax file for sublime or Notepad++ would be really awesome and recommended.
I think this would be easy to automate.
I’m not planning to use the KCWinTCP either, so I will probably make a ‘makefile’. With a makefile you can use any editor you want, and upload it from your editor of choice. It is also possible to make different tasks in this file. Like for testing (so it automatically sets 10% speed) or for real (full speed). If the protocol is over telnet or tcp/udp, there should be no problems.
This would also eliminate the need for Putty.
Jeffrey Paul
1 Like
Sounds interesting, could you explain how that works?
The Kawasaki robots with D controllers do use Telnet, but they altered it slightly. I will post the details about that later today.